この記事のポイント
 NVIDIA Cosmosは物理AI開発のための次世代プラットフォーム
NVIDIA Cosmosは物理AI開発のための次世代プラットフォーム- オープンライセンスで提供される「World Foundation Models (WFMs)」により、空間や物理的相互作用を高精度にシミュレート
- 合成データ生成や高速シミュレーションを活用したモデルトレーニングにより、開発効率と安全性を向上
- ロボットや自動運転(AV)をはじめとする、様々な物理AI開発のユースケースに対応
- NVIDIA Cosmosを活用することで、あらゆる規模の企業が物理AIソリューションを構築し、イノベーションを加速

Microsoft MVP・AIパートナー。LinkX Japan株式会社 代表取締役。東京工業大学大学院にて自然言語処理・金融工学を研究。NHK放送技術研究所でAI・ブロックチェーンの研究開発に従事し、国際学会・ジャーナルでの発表多数。経営情報学会 優秀賞受賞。シンガポールでWeb3企業を創業後、現在は企業向けAI導入・DX推進を支援。
NVIDIAがCES 2025で発表した次世代プラットフォーム「NVIDIA Cosmos」は、ロボットや自動運転(AV)をはじめとする“物理AI”開発を大きく前進させる注目のテクノロジーです。
膨大な実世界データを学習し、空間や物理的相互作用を高精度にシミュレートする「World Foundation Models (WFMs)」をオープンライセンスで提供することにより、企業規模を問わず革新的なAIソリューションを手軽に構築できるようになりました。
合成データの生成や高速シミュレーションを活用したモデルトレーニングは、開発効率と安全性の向上にも大きく寄与します。
本記事では、Cosmosの概要や主要機能、導入メリットから使い方、具体的なユースケースまで、物理AI開発をリードする新たなプラットフォームの全貌を徹底解説します。
AI総合研究所はNVIDIA Inception Program の正式な採択企業です。 AI導入を検討中の企業のご担当者様はお気軽にご相談ください。
目次
物理AI(Physical AI)とWorld Foundation Modelsの基礎知識
物理AIとは何か?現実世界を理解し、行動するAIの次なるフロンティア
WFM(World Foundation Models)を支える技術的背景
2. 合成データ生成 ( text to movie, image to movie)
Cosmosモデル(Nano、Super、Ultra)のご紹介
NVIDIA Cosmosとは?
%E3%81%A7%E3%81%AE%E3%82%B7%E3%83%A5%E3%83%9F%E3%83%AC%E3%83%BC%E3%82%B7%E3%83%A7%E3%83%B3%E7%94%BB%E5%83%8F.webp)
Cosmos World Foundation Models (WFMs)での実際のシュミレーション画像
物理AI(Physical AI)開発を一気に加速させる新プラットフォームとして、NVIDIAがCES 2025で正式発表したのが「NVIDIA Cosmos」です。
主役となるのは、膨大な実世界の動画・画像データから学習(9,000兆トークンと2,000万時間の動画データを活用し、現実世界のほぼすべてのシナリオを包括)しており、物理的・空間的相互作用を高精度に予測・生成する「Cosmos World Foundation Models (WFMs)」 です。
これらのモデルが 「オープンモデルライセンス」 のもとで公開されたことで、個人や小規模ベンチャーでも高度な物理AI技術を活用しやすくなりました。
NVIDIAがこのタイミングでCosmosを打ち出した背景には、ロボットや自動運転などの領域で“リアル世界”のデータを大量に取り扱うニーズが急速に高まっていることが挙げられます。
WFMsは、テキストから世界を生成したり、既存の動画に対して未来のシーンを推定したりするなど、多彩な生成タスクに対応することができます。
また、NVIDIAのクラウドプラットフォームやOmniverseとの連携により、大規模シミュレーションや合成データ作成もスムーズに行えます。
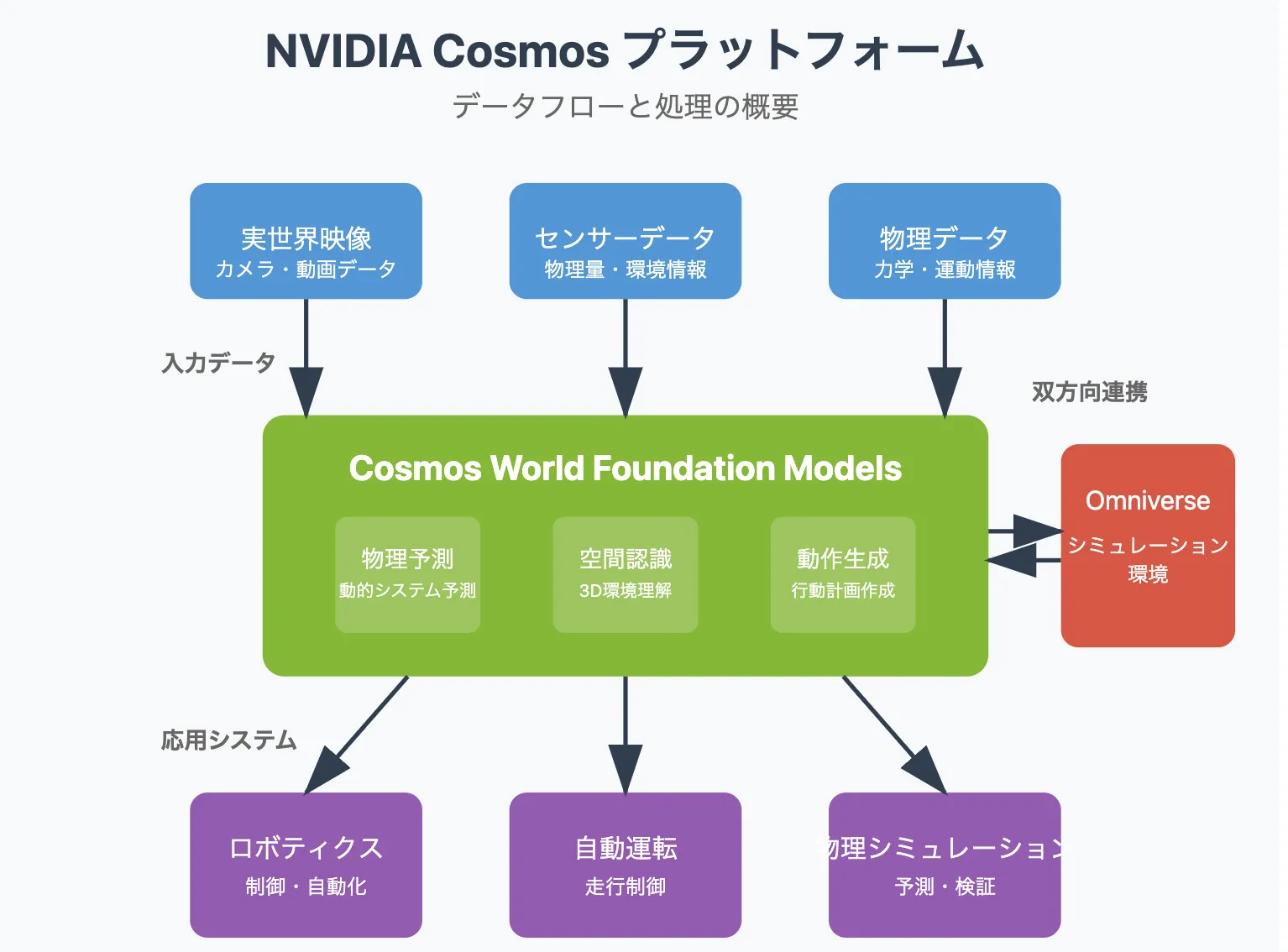
NVIDIA Cosmos プラットフォームイメージ
こうした包括的な環境が整ったことで、開発者は膨大なリソースを割かずとも、スピーディーかつ低コストに物理AIの実装や実験を行えるようになりました。今後、WFMsを活用したロボティクスや自動運転の研究・開発が格段に進むことが期待されています。
用語解説
- 物理AI(Physical AI)
現実世界の物理的な環境・オブジェクトに対して行動し、学習するAI技術の総称です。
ロボットや自動運転のように、人間やモノが動き回る空間で安全かつ効率的にタスクをこなすために不可欠な技術です。
- Cosmos World Foundation Models (WFMs)
Cosmos上で提供される大規模AIモデル群の名称です。膨大な動画や画像を学習し、物理空間や物体の相互作用を正確に把握するよう設計されています。
動画から未来のシーンを予測したり、テキストから世界を生成したりするなど、多目的に利用できるのが特徴です。
- オープンモデルライセンス
NVIDIA独自のライセンス形態で、モデルの商用利用を含めた幅広い活用が可能です。
従来の厳しい制限付きライセンスと異なり、個人開発や小規模ベンチャーもハードルを感じずに高度なAIモデルを取り入れることができます。
- NVIDIA Omniverse
NVIDIAが提供するリアルタイム3Dシミュレーションとコラボレーションのプラットフォーム。複数のアプリケーションやツールをつなぎ合わせ、実世界に近い3D環境を作り出すために使用されます。
CosmosのWFMsと組み合わせることで、大規模かつ高精度な合成データの生成が可能になります。
- クラウドプラットフォーム(DGX Cloudなど)
GPUや高性能サーバー環境をクラウド上で利用できるサービスです。
Cosmosのように大規模モデルの学習・推論を行う際は、ローカル環境に加えてクラウドのリソースを活用することで、より迅速に開発・検証を進められます。
物理AI(Physical AI)とWorld Foundation Modelsの基礎知識
Cosmosの説明の前にその前提となる基礎知識をご説明したいと思います。
こちらはNVIDIA が公開しているPhysisal AIの説明動画です。
未来の可能性を感じられずにはいられませんね。
物理AIとは何か?現実世界を理解し、行動するAIの次なるフロンティア
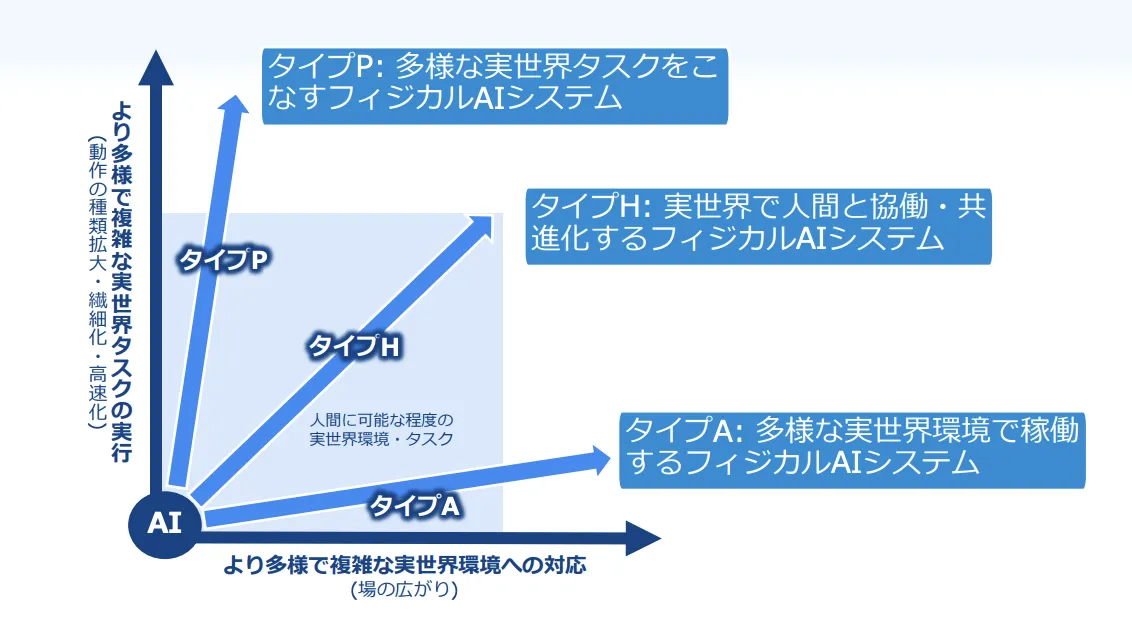
タイプ別のフィジカルAI科学技術振興機構(JST)
研究開発戦略センター(CRDS)
物理AIとは、「物理的な身体機能を獲得したAIシステム」です。
ロボットや自動運転など、現実世界で動作するAIアプリケーションでは、目の前にあるモノがどこにあるのか、どう動くのか、といった物理的・空間的な情報を正しく理解することが不可欠です。
こうした現実世界に根ざした人工知能を開発・運用するための技術領域が、物理AI(Physical AI) と呼ばれています。
タイプはPHAの三種類にわかれており、パフォーマンス(P)、ヒューマノイド(H)、アダプティブ(A)が提唱されています。
生成AI→AIエージェントと続き、社会は次なる成長「Physical AI」に進んでいます。
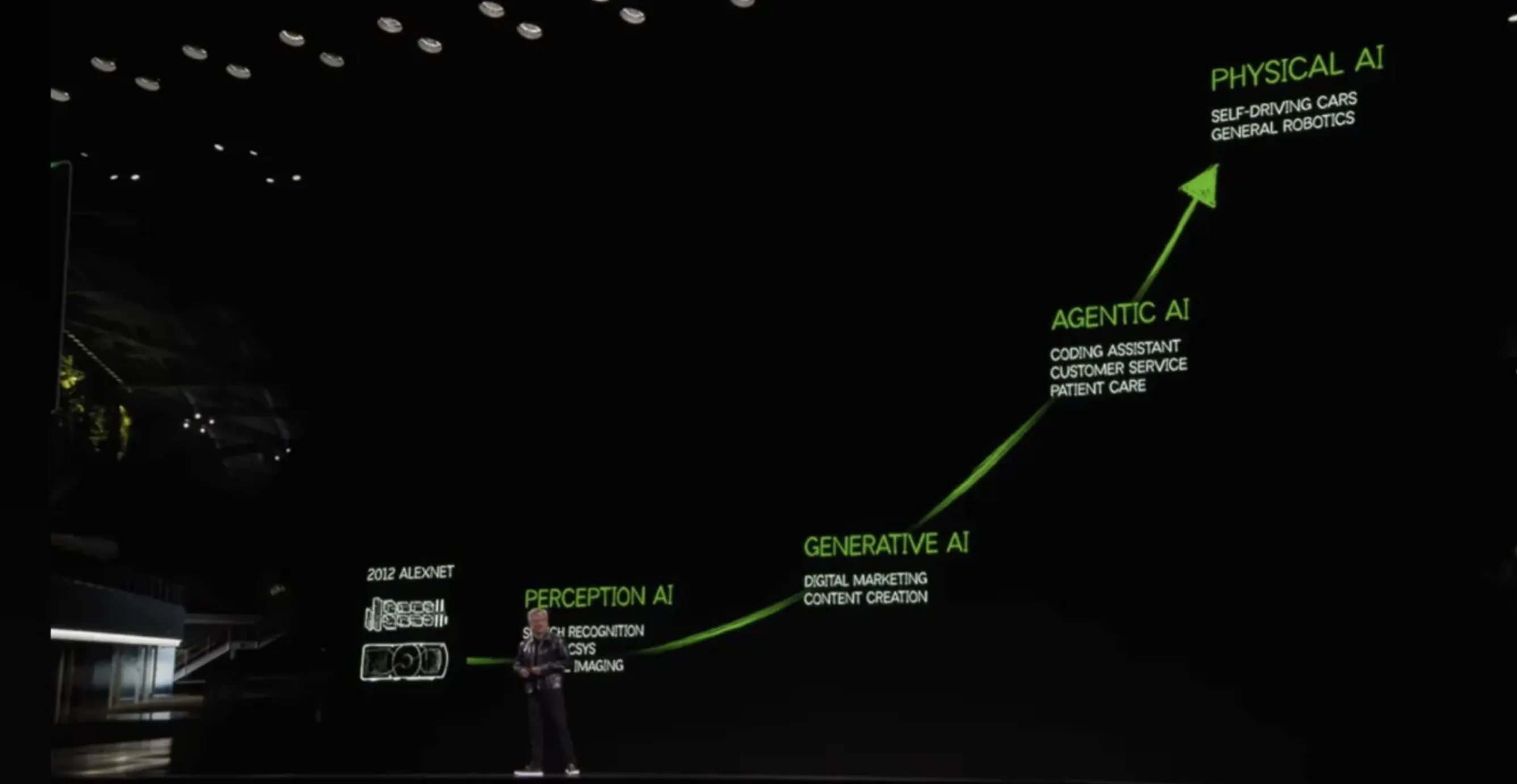
CES2025での一場面:予測AIから生成AIそしてAIエージェント、物理AIに発展する様子
WFM(World Foundation Models)を支える技術的背景
物理AIを実現する上で登場した新たな概念が World Foundation Models(WFMs) です。
これは、画像や動画、テキスト、動き(動作データなど)といった多種多様な情報を大規模に学習し、空間内での物体の位置関係や運動量、さらには物理的相互作用 をモデル化する仕組みを指します。
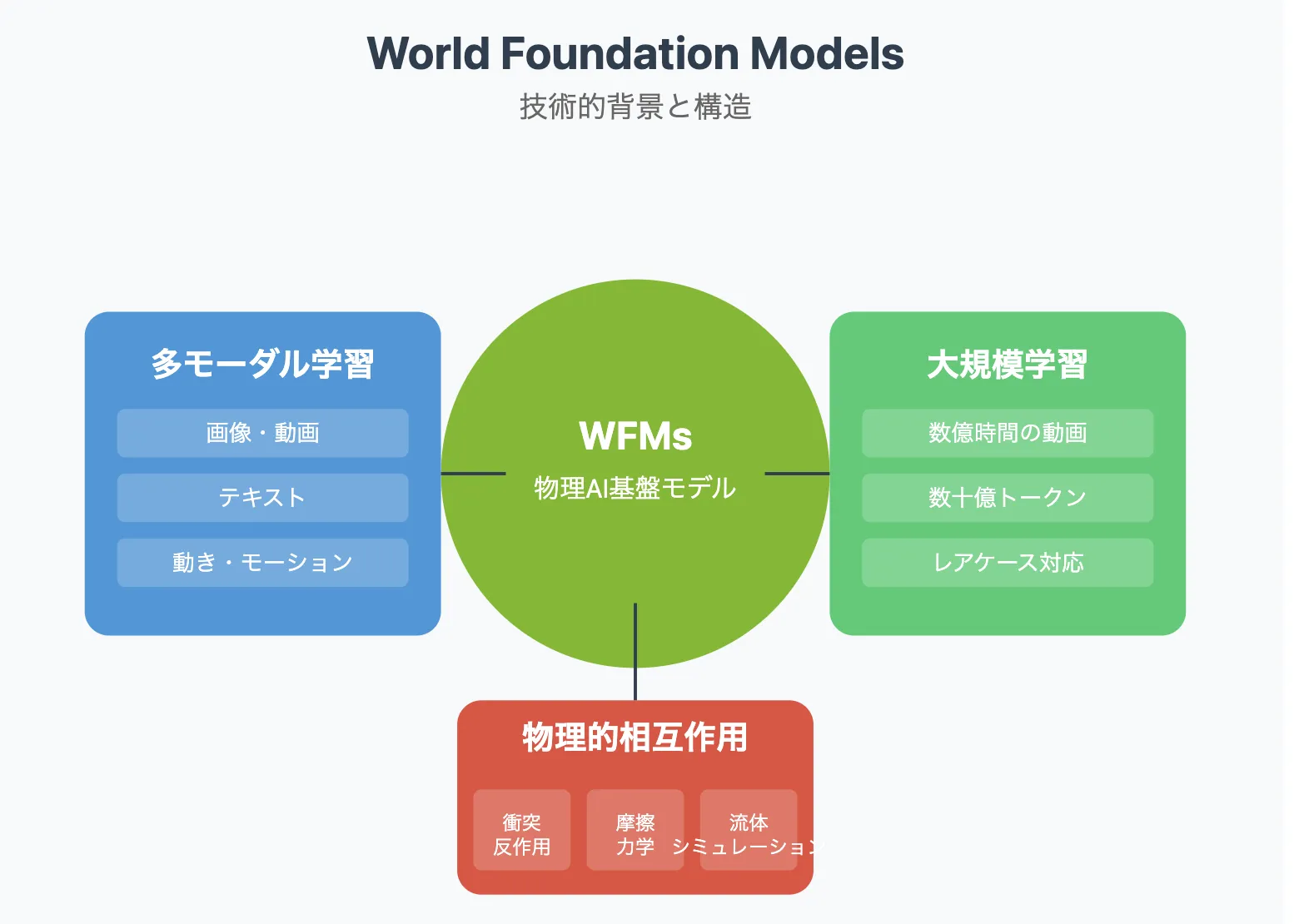
WFMイメージ
特徴は以下の3つです。
1.多モーダル学習
- 画像・動画・テキスト・動き(モーションキャプチャやセンサー情報など)を統合的に学習することで、単なる視覚情報だけでなく、言語や運動の文脈も理解。
- 例:テキストから「ボールを投げる」動きを再現した動画シーンを生成するなど。
2.大規模学習による汎用性の高さ
- 数千万~数億時間分の動画データや何十億というトークンを学習することで、通常のAIモデルでは捉えにくい多彩な状況・環境にも対応。
- 例:雨天時や夜間、特殊な地形でのロボット動作を含む、レアケースへの強さ。
3.物理的・空間的相互作用の理解
- 単に映像のフレームを予測するだけでなく、オブジェクト同士が衝突した際の反作用や摩擦、流体力学などをある程度シミュレーションできる。
- 例:ボールを投げた後の弾道やバウンドの仕方を高精度に予想、衝撃で他の物体が動く様子も推定。
従来の動画生成AIとの違い
大規模言語モデル(LLM)が「文脈理解」に注力してきたのに対し、CosmosのWFMは物理空間の文脈を理解しようとする点が特徴的です。
すなわち、単語同士の関連性だけでなく、実際のオブジェクトのサイズ感・位置関係・運動方程式的な関係性といった要素も学習の対象となっています。
これにより、ロボットアームがどのように動けば物体を正しくつかめるのか、自動車が急カーブでどのような挙動をとるかといった「空間×動作」の問題を大幅に最適化できるわけです。
ポイント
従来のモデルは画像認識や言語処理に強みを持ちましたが、「未来のシーンを予測する」「シーン内の物理現象を再現する」という領域では限界がありました。
Cosmosは大規模データと物理シミュレーションを組み合わせることで、その限界を突破しようとしています。
Cosmosプラットフォームの主な機能
では、Cosmosについて詳しく解説していきます。
4つカテゴリにわけてその詳細を徹底的に解説いたします。

4つの主要機能
1. 物理シミュレーション
- 高精度なシミュレーション環境
Cosmosは、NVIDIA Omniverseと統合されており、高度な物理シミュレーションを実現します。
例
・ 衝突判定: ロボットが物体を掴む際の正確な動作シミュレーション。
・ 流体シミュレーション: 液体や気体の動きをリアルに再現(例:雨天の走行条件)。
・ 重力や摩擦の再現: 現実世界の力学的挙動をモデル化。
- 複数センサー情報のエミュレーション
実環境に近いセンサーデータを生成することで、物体認識や動作予測モデルを検証できます。
例
・実世界のセンサー(カメラ、LiDAR、音波センサーなど)のデータを仮想空間で再現。
・自動運転やロボティクスの認識モデルを効率的にテスト可能。
2. 合成データ生成 ( text to movie, image to movie)
- Cosmosの生成モデル(拡散モデル、自己回帰モデル)を活用し、多様なシーンや動作データを自動生成可能。
- テキスト→動画生成
例:「赤いスポーツカーが夜間のカーブを曲がるシーン」をテキストプロンプトとして入力すると、その映像を生成。
- 動画→未来予測
実際の動画を入力し、次のフレームやアングルを予測・生成。
(間、障害物)のシミュレーション生成。
- ロボティクス: 倉庫作業や産業用ロボットの動作パターン生成。
- 産業用シーン: 工場内の安全性検証や効率性向上のための仮想環境構築。
3. 効率的なデータ処理と柔軟なモデル構築
NeMo Curator: Cosmosに含まれるデータ処理パイプライン
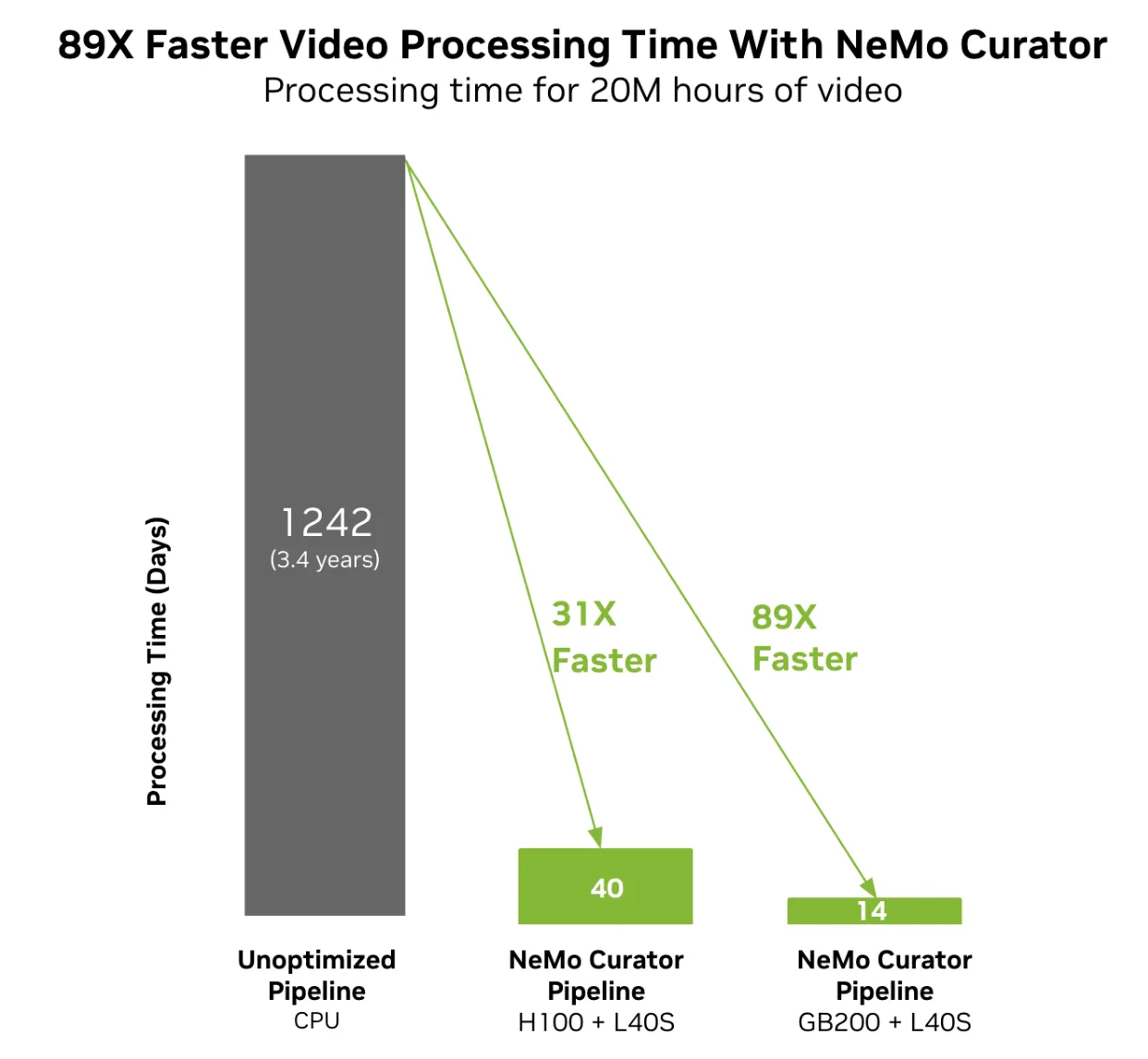
NeMo Curatorによる処理の高速化参照:NVIDIA
表:CPU vs GPUベースでのデータ処理速度
| 項目 | CPUベースの場合 | GPUベース(NVIDIA Hopper/Blackwell) |
|---|---|---|
| 処理規模の上限 | 数百~数千時間分/日 | 数万時間以上/日 |
| 処理速度 | 数テラバイト/週 | 数ペタバイト/週 |
| 所要期間(大規模データの場合) | 3年以上 | 40日~14日程度 |
| コスト・消費電力 | 比較的低コストだが長期化 | 初期投資は高いが時間的効率が高く総合コスト圧縮 |
- 機能
データ収集からクリーニング、アノテーションまで一括管理。
- 性能
従来のCPUベース処理に比べて数十倍高速(GPUを活用)。
- 具体例
- 数ペタバイト規模の動画データを数週間で処理。
- トレーニングデータとして使える状態に整備。
CPUベースの従来手法では数年かかるようなデータ量でも、GPUの大規模並列処理により大幅に時間短縮が図れます。
トークナイザ(Tokenizer)
- 概要
動画データを「トークン」(小さなデータ単位)に分解し、生成モデルに最適化。
- 特徴
- 8倍の圧縮率と12倍の処理速度を実現。
- 高圧縮モード(効率重視)と低圧縮モード(品質重視)を選択可能。
- 用途
動画や画像データを効率よく扱える形式に変換し、モデルのトレーニングや推論速度を向上。
柔軟なモデル構築
- ファインチューニング(Fine-Tuning)
- NeMoフレームワークを使い、Cosmosの既存モデルを自社専用データで再学習可能。
- 例:特定の条件(雪道での自動運転、特定の工場ライン作業など)に特化したモデル構築。
- モデルのトレーニング効率
高性能GPUを活用することで、短期間で高精度な結果を得られる。
4. 安全性と運用効率
Guardrails(ガードレール機能)
-
役割: Cosmosを商用や公共利用に安全に活用するための機能。
-
主な機能:
- 不適切なテキストや画像のフィルタリング。
- 生成結果(動画や画像)のポストプロセッシングによるスクリーニング。
-
ウォーターマーク機能
AI生成コンテンツに識別可能なタグを埋め込み、トレーサビリティを確保。
DGX Cloudとスケーラビリティ
-
DGX Cloud: NVIDIAのクラウド型AIプラットフォームで、以下を実現しています。
- 高性能GPUを利用し、大規模トレーニングや推論を効率的に実行。
- 専用のハードウェア環境を構築する手間を削減。
-
スケーラブルなモデル設計
- Nano、Super、Ultraの3種類のモデルを提供し、用途やリソースに応じた柔軟な選択が可能。
NVIDIA Cosmosは、物理シミュレーション、合成データ生成、大規模データ処理、AIモデル構築、安全性確保といった全要素を一つのプラットフォームに統合しています。
この統合により、次世代のロボティクス、自動運転、産業用AI、AR/VRなどの分野で効率的かつ安全なAI開発が可能になります。具体的なユースケースに応じて、Cosmosの機能をフル活用することで、開発速度を劇的に向上させることができるでしょう。
Cosmosモデル(Nano、Super、Ultra)のご紹介
Cosmosには、用途やリソースに応じて最適化された3種類のモデルが提供されています。
.webp)
Cosmosモデル(Nano、Super、Ultra)
| モデルカテゴリ | 特徴 | 用途例 |
|---|---|---|
| Nano | リアルタイム性を重視し、低レイテンシと軽量推論に最適化。 | ドローンやロボットの動的制御、ARデバイスでのリアルタイム推論。 |
| Super | 高精度とパフォーマンスのバランスが取れたベースラインモデル。 | 一般的なロボティクス、自動運転の研究や本番環境での活用。 |
| Ultra | 最高品質・最高精度を実現し、大規模データセンターや研究開発向けに設計。 | 医療用ロボットや極限環境の自動制御、高度なシミュレーション。 |
モデル選択のポイント
- リアルタイム性が重要ならNanoモデルを選択。
- 幅広い用途に対応したい場合はSuperモデルを採用。
- 最高品質・忠実度が必要な場合はUltraモデルを活用。
パラメータ規模
-
モデルは40億~140億パラメータ規模で設計され、用途に応じて最適化することができます。
例:
- Cosmos-1.0-Diffusion-7B: テキスト→動画生成。
- Cosmos-1.0-Autoregressive-12B: 動画→未来予測。
Omniverseとの連携で高精度な合成データを高速生成
NVIDIA Omniverseはリアルタイム3Dグラフィックスと物理シミュレーションを扱うためのプラットフォームであり、CosmosのWFMと組み合わせることで強力なシナジーを生み出します。
-
合成データの大量生成
- Omniverseで3Dシーンを作成し、Cosmosモデルの力を借りてさまざまな気象条件や時間帯、物体配置などを自動生成。
- 大量のレアケース(夜間、豪雨、山岳地帯、災害時など)も効率的にカバー可能。
-
リアルタイム・インタラクティブなシミュレーション
- 物理エンジン(衝突判定、流体シミュレーションなど)を組み合わせ、高精度なバーチャル実験空間を構築。
- ロボットや自動車のセンサーデータを仮想的に生成し、実際の動きとの比較検証を繰り返すことで、開発プロセスを加速。
実際に使ってみましょう
以下では、NVIDIA Cosmosを 「GPU環境がある場合」と「GPUがない場合」 の両面から統合的にまとめた手順書を提示します。
まずは最低限必要な知識や準備物を整理し、その後に実際のハンズオン手順をステップバイステップで解説します。
前提知識と準備
-
GPUの有無による違い
- GPUアリ(推奨): 本格的な推論(Text2World / Video2World)や再学習(Fine-Tuning)を行うには、ハイエンドGPU(RTX 3090/4090クラス以上、またはクラウドGPU)が必要。
- GPUナシ: 公式WebデモやHugging Face Spacesのデモで“お試し”利用が可能。ただし、CPUのみでは推論に非常に時間がかかったり、一部機能が制限されたりする。
-
どんなデータを扱うか
- テキストプロンプトを入力して新たなシーンを生成したいのか、既存の動画を使って“未来予測”を行いたいのかで必要な手順が異なります。
- 独自データを使って再学習(Fine-Tuning)したい場合は、NeMoフレームワークと追加データ(動画やラベル)が必要。
-
どんなことができるか
「開発者によるNVIDIA Cosmosの利用方法」に含まれる5つの要素を簡潔にまとめた表を作成しました。
| 利用方法 | 概要 | 主な用途 |
|---|---|---|
| ビデオ検索 | Cosmosが過去の動画データを高速に検索し、関連するシーンや動作を特定。 | 自動運転車の走行シナリオ分析、ロボット動作の学習データ抽出。 |
| 制御可能な3Dからリアルへ | 3Dシミュレーションから物理法則を考慮したリアルな合成動画を生成。 | 仮想空間で設計したシナリオを現実的な合成データとして利用可能に。 |
| ポリシーモデル | Cosmosを活用して、特定のタスクに最適な行動モデルを生成。 | 自律走行車やロボットの意思決定アルゴリズムをトレーニング。 |
| 先見の明 | 過去と現在のデータから、未来の動作やシーンを予測する能力を提供。 | 交通予測、産業用ロボットの動作計画、災害時の応答シナリオ構築。 |
| マルチバースシミュレーション | CosmosとOmniverseの連携で、複数の仮想環境を同時に構築し、異なる条件下でテストを実行可能。 | 自動運転やロボットの動作を多様な条件で検証、異常ケースを事前に特定して改善。 |
Web版を使ったNVIDIA Cosmosのトライアル方法

-
公式ページへアクセス
- NVIDIA Cosmos シュミレーションのページを開きます。
- NVIDIA Cosmos シュミレーションのページを開きます。
-
操作方法
- テキストプロンプトか画像や動画をインプットとしてを入力し。
- 結果(動画や画像)をブラウザでプレビュー。

実際の操作画面
-
適用例
実際に利用した動画を下記に紹介します。
動画だと生成に60秒ほどかかります。また回数の制限もあるのでご注意ください。
実際の生成動画
特徴:
- メリット: インストール不要で即時利用可能。
- 制約: 結果の品質や動画長さに制限あり。インプット画像や動画もサンプルから選んで出力する。
その他の方法:Web版以外の選択肢
Cosmosを本格的に活用したい場合、以下の選択肢があります。
1. 簡易クラウド利用(Google Colabなど)
- 概要: Google ColabやKaggleで提供される無料GPU枠を使い、Cosmosモデルを試す。
- 特徴: 無料で軽い推論や簡単な再学習が可能。
- 制約: 長時間利用や大規模モデルには非対応。
2. ローカルGPU環境での本格利用
- 概要: 高性能GPUを搭載したマシン(オンプレ)でDockerを使い、Cosmosをフル活用。
- 特徴: 高度な再学習や大規模な推論が可能。
- 制約: 初期コストが高い。
3. クラウドGPU環境での利用
- 概要: AzureやNVIDIA DGX CloudなどでスケーラブルなGPUリソースを利用。
- 特徴: 一時的なプロジェクトや短期学習に最適。
- 制約: 利用量に応じたコストが発生。
初心者に最適な選択肢は?
- まずは公式Webデモや Hugging Face Spaces で、Cosmosの基本機能を試すのがおすすめです。
- 手軽にテキストプロンプトを使い、生成結果を確認できます。
- 本格利用を検討する際は、Google Colabで軽く試してから、ローカルやクラウドGPU環境へのステップアップを検討してください。
Cosmosは、物理AIの可能性を広げるツールとして非常に強力です。まずはWeb版から触れてみて、その魅力を体感してください。
実践例:ロボティクス・自動運転の事例
NVIDIA Cosmosがもたらす最大のメリットは、合成データの生成から物理シミュレーション、モデルのファインチューニングまでを統合的に行える点です。ここでは代表的なユースケースとして「ロボット開発」「自動運転(AV)」「その他分野」への応用を見ていきます。
| ユースケース | メリット | Cosmos活用の具体例 |
|---|---|---|
| ロボット開発 | - 安価な合成データで大量トレーニング - 仮想空間での試行錯誤が容易 - リアル世界での実験回数を大幅削減 |
- ロボットアームの動作学習 - 倉庫での自動搬送ロボットの動線最適化 |
| 自動運転(AV) | - 膨大な走行シーンを仮想生成し異常シナリオを徹底テスト - 既存実走行データ+合成データで多様な道路状況に対応 |
- 夜間や悪天候などレアケースの大量生成 - Waabiなどが進める高精度シミュレーション |
| その他分野 | - スマートシティや産業用ロボットにも応用 - AR/VRやシミュレーション学習への波及効果 |
- 工場ラインの動的シミュレーション - 建設現場での安全対策検証 (デジタルツイン) |
ロボット開発への恩恵
-
合成データの大量トレーニング
ロボットが認識・判断・動作する際に必要な画像・動画データを、Cosmosの生成モデルを使って自在に作成できるようになります。今までであれば、倉庫で商品を運ぶロボットなど、実際の検証には膨大な環境構築が必要ですが、合成データであれば低コストかつ短期間で何十万ケースも準備できます。
-
仮想空間での試行錯誤
Omniverseによる物理シミュレーションと組み合わせることで、ロボットの動作テストをリアルに再現します。障害物の配置や移動パターンを変えながら安全性や効率を検証できるため、実機実験への負荷が大幅に減少します。
自動運転(AV)への応用
-
異常シナリオの徹底テスト
自動運転車が走行中に遭遇しうる「突然の横断者」「障害物の飛び出し」「予期せぬ渋滞」などのレアシナリオを合成データとして大量生成し、繰り返し学習・シミュレーションが可能となります。- 例:Waabiのような企業が取り入れる最先端手法では、実走行データと仮想シナリオを組み合わせて総合的な安全性検証を実施。
- 例:Waabiのような企業が取り入れる最先端手法では、実走行データと仮想シナリオを組み合わせて総合的な安全性検証を実施。
-
都市・路面環境の多様化
悪天候、夜間走行、雪道や山岳地帯といった厳しい環境に対しても、Cosmosが学習した大規模モデルとOmniverseによるシミュレーションを活用すれば、現地に行かなくてもデータが準備可能です。より現実的なパターンがシュミレーションできるでしょう。
その他分野への波及
-
スマートシティ・産業用ロボット
都市全体の交通シミュレーションや工場ラインの動的最適化など、リアルな物理シミュレーションが求められる幅広い領域に応用。- 例:交通流や人の動きをリアルタイムに再現し、渋滞対策や歩行者安全を検証する。
- 例:交通流や人の動きをリアルタイムに再現し、渋滞対策や歩行者安全を検証する。
-
AR/VR・シミュレーション学習
高精度な3D空間や動画生成能力が活きるため、トレーニングやエンターテインメント分野の学習コンテンツ開発も期待されます。- 例:整備士や医療従事者向けの訓練プログラムで、複雑な操作手順を可視化・体験学習できる。
TOYOTAとの協業とその事例:スマートシティと次世代モビリティ

NVIDIA参考:NVIDIA
2025年1月6日、ラスベガスで開催されたCESにおいて、NVIDIAはトヨタ自動車、Aurora、Continentalとの戦略的パートナーシップを発表しました。これにより、NVIDIAのアクセラレーテッドコンピューティングとAI技術を活用して、自律走行車や高度な運転支援システムの開発がさらに進化します。
ではどのような取り組みでしょうか。
次世代自動車開発
トヨタは、NVIDIAの車載グレードSoCであるDRIVE AGX Orin™と、安全認証を受けたDriveOSオペレーティングシステムを組み合わせ、次世代の安全性と高度運転支援機能を備えた車両を開発します。
スマートシティへの応用

ウーブンシティイメージ画像
トヨタが構想するスマートシティ「ウーブンシティ」において、NVIDIAの技術はモビリティ分野の中核を担い、車両間通信やAIによる交通最適化が期待されています。
事例:Auroraとのレベル4自律走行車
Aurora DriverにNVIDIA DriveOSとDRIVEコンピューティングを統合し、2027年に量産予定のレベル4自律走行システムを支援。これにより、大規模なドライバーレストラックの展開が可能になります。
私たちの生活にAIが搭載された機械やロボットが溢れる日もそう遠くはなさそうですね。
まとめ
本記事では、NVIDIA Cosmosとその関連技術が、次世代モビリティと物理AIの領域でどのように活用されるかを解説しました。
-
Cosmosとその機能
- 物理シミュレーション、合成データ生成、大規模学習データ処理、安全性確保の機能を統合したプラットフォーム。
- オープンモデルライセンスにより、誰もがその技術を活用可能。
-
ユースケースの多様性
- 自動運転やロボティクス、産業シミュレーション、スマートシティ構築など、さまざまな分野で応用。
- 自動運転やロボティクス、産業シミュレーション、スマートシティ構築など、さまざまな分野で応用。
-
トヨタとの協業によるインパクト
- NVIDIA DRIVEプラットフォームを基盤にした次世代自動車開発とスマートシティでの活用。
- NVIDIA DRIVEプラットフォームを基盤にした次世代自動車開発とスマートシティでの活用。
-
物理AIによる産業革命の可能性
- CosmosやNVIDIAの技術は、モノづくりの現場から未来都市まで、AIの力で人々の生活を革新するポテンシャルを持っています。
開発者や研究者へのメッセージとして、早期にCosmosやNVIDIAの関連技術を導入し、学習リソースを確保することで、次世代AIの恩恵を最大化できるでしょう。未来のAI活用はすでに始まっています——その一歩を踏み出すのは、今です。一緒に未来に向けて成長していきましょう。
AI総合研究所では最新AIの企業導入、開発、研修を支援しています。AI導入の企業の担当者様はお気軽にご相談ください。